
1 緒言
製品評価において、複雑かつ極めて短時間に発生する現象を非接触で可視化・解析することが望まれる場面がある。1つの解決手段として、高速度カメラを用いた動画解析手段が考えられる。搬送ローラー間の受け渡し時の増速に伴う搬送用紙の回転および滑り挙動を検証した事例が報告されている1)。用紙に格子状のマーカーを施し、高速度カメラで観察し、姿勢変化と速度の関係を定量化した結果、受渡しの安定化のためには、上下流ローラーの保持力差を設けることが有効であるという設計的示唆を得ている。
また、転写部から定着部までの搬送経路において、初期カール形状を持つロール紙を用い、高速度カメラによる観察により搬送挙動の差異を明らかにし、シミュレーションと比較した事例が報告されている2)。これらの事例は搬送紙の一部がローラーで常時保持されており、単一方向の搬送を前提とした比較的単純なシステムを対象とする評価技術である。複数の構成部品が関与し、複数方向への搬送が伴う後処理装置(以下、フィニッシャーと表記)を対象とした先行例は見当たらない。自社内における従来手法としては、見える範囲をマルチアングルに動画撮影し、目視確認による物理現象の推定が主流であったが、紙や機構の挙動の過渡的な変化を十分に把握できず、判定基準が曖昧になり、評価方法としての限界があった。紙搬送に関連する機構の挙動も含めて精密に捉え、紙揃え機能を作り込む必要がある。
そこで、本稿では、Fig. 1に示す新規設計の胴内後処理装置FS-542(2024年12月に上市)の機能設計に向けて、高速度カメラで俯瞰撮影し、用紙と機構の挙動を機能的に評価する手法を構築した。これにより、用紙搬送挙動を定量化し、過渡状態に対する具体的な管理値を設定することで、機能の良否を判定できるようになった。製品評価技術の発展に寄与することができた。
Fig. 1 Appearance of the new inner finisher FS-542
2 実験
2-1. FS-542の製品構成と設計課題
新規インナーフィニッシャーFS-542は、省スペース化と高機能を両立した戦略的な製品である。便利に、手早く、美しい冊子の後処理の自動化によって、スムースなワークフローを顧客価値として提供する。その機能の1つとして、紙束を積載トレイに排出するグリッパー機構(紙束を掴みながら搬送する機構)を採用することにより、揃えた用紙束を把持して排出するため排出後の揃い性を大幅に改善している(前任機FS-533では、60 mm程度だったズレ幅を約1/10に縮小し改善した)。これを省スペースかつ低コストで実現した。
Fig. 2にFS-542における後処理の動作シーケンスを示す。Fig. 2 (a)~(d)に示すように、複合機本体から排出されてきた用紙を処理トレイ上に受け入れ、パドル(回転する弾性片により、紙に摩擦による搬送力を与える部品)でスイッチバック搬送(通常の紙送り方向と逆方向への搬送)することでエンドフェンスに縁端を突き当てて整合する。このとき、サイドフェンスで搬送方向と直交する方向の縁端も整合し、紙束の四辺を揃える。これらの処理を指定枚数だけ繰り返し、その後に綴じ処理があるモードの場合はステープラーで綴じ処理を実行し紙束を綴じる。そして、Fig. 2 (e)~(f)に示すように、紙束を掴んで積載トレイに向けて排出する。この際に、積載トレイ上の紙束の積載ずれが問題現象として生じる。Fig. 3に問題現象の詳細を示す。グリッパーハウジング(グリップ機構を構成する筐体)が受取位置から積載位置に移動する際に、グリッパーハウジングの傾きに伴ってグリッパーで把持した紙束が傾き、処理トレイから積載トレイに用紙を降ろして背板に突き当てる際に奥側の傾き分だけ紙が撓んで反力となり、グリップ解除時に紙束が弾かれ、最終的に手前に大きく傾き、積載ずれが発生していた。
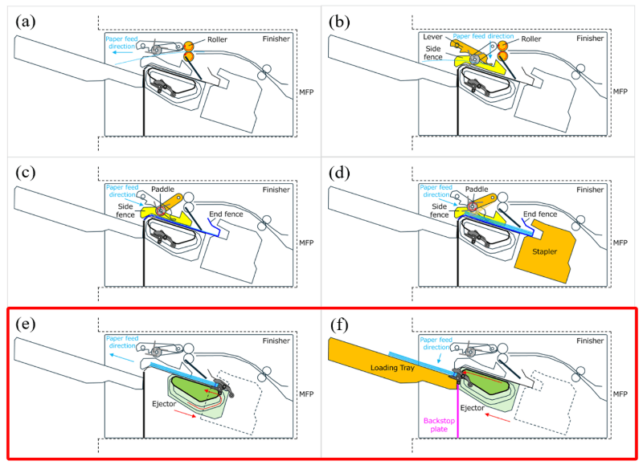
Fig. 2 Finisher operation sequence
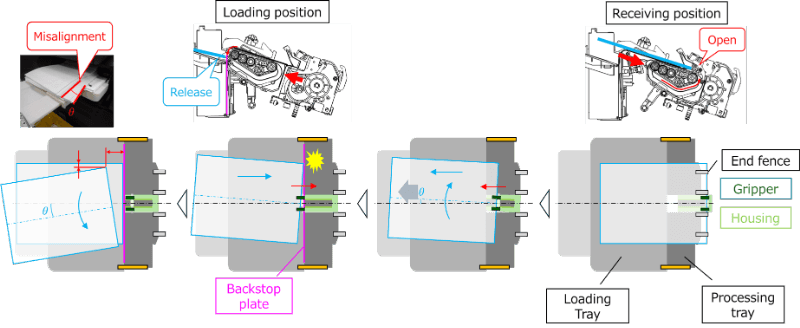
Fig. 3 Operational sequence and malfunction phenomena of the ejector unit
Fig. 4にグリッパー機構の内部機構を示す。本グリッパー機構の1つ目の特徴は、ハウジング移動式グリップ排紙機構を採用していることである。最小用紙幅90 mmに対応し、グリッパーのみで全域の紙束搬送を可能としている。2つ目の特徴は、移動機構を1モーター(片側駆動)で実現していることである。これらの特徴によって、省スペース化、低コスト化を実現している。これらの利点の一方で、駆動側と非駆動側の駆動負荷のアンバランスにより、グリッパーハウジングが移動時に傾くという課題があった。この対策として、ラック・ピニオンによる規制、トーションバー(棒状の弾性体)による傾き補正を施している。従来手法(見える範囲をマルチアングルに動画撮影し、目視確認による物理現象の推定)では、紙や機構の挙動の過渡的な変化を十分に把握できず、判定基準が曖昧になり、評価方法としての限界があった。そこで、次節以降で述べる動画解析手法により、用紙搬送挙動を定量化し、過渡状態に対する具体的な管理値を設定することで、機能の良否を判定できるようになった。
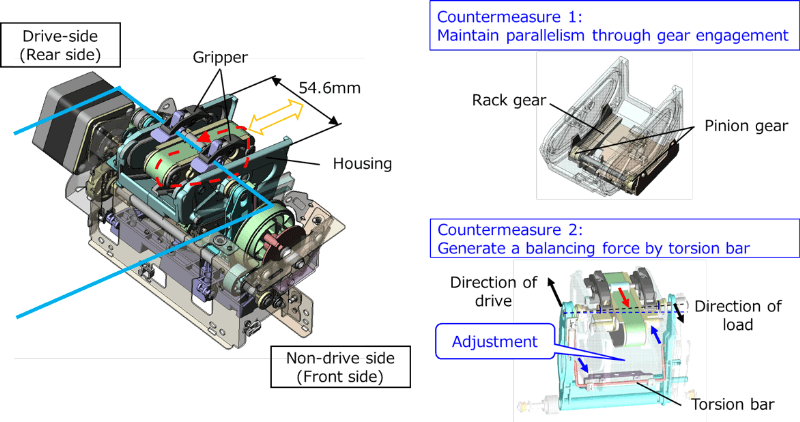
Fig. 4 Internal configuration of the ejector unit
2-2. 計測システムおよび撮影方法
高速度カメラ(High-speed camera)とは、人間の眼では捉えられない高速現象を、高速度で画像として取り込み、スローモーション再生して可視化する撮影機械の総称である。本稿における実験環境をFig. 5に示す。撮影機材としては、可視光・高速度カメラ(Photron社製 FASTCAM Mini AX)と照明機材(Photron社製 HVC-SL)を用い、それぞれ三脚に固定した。また、高速度カメラを付属ソフトウェア(Photron社製 Photron FASTCAM Viewer)がインストールされたPCに接続した。そして、撮影対象であるフィニッシャーの機構部や紙にキャリブレーションに用いる基準尺(格子パターン)、追跡用のカラーマーカーを施した。
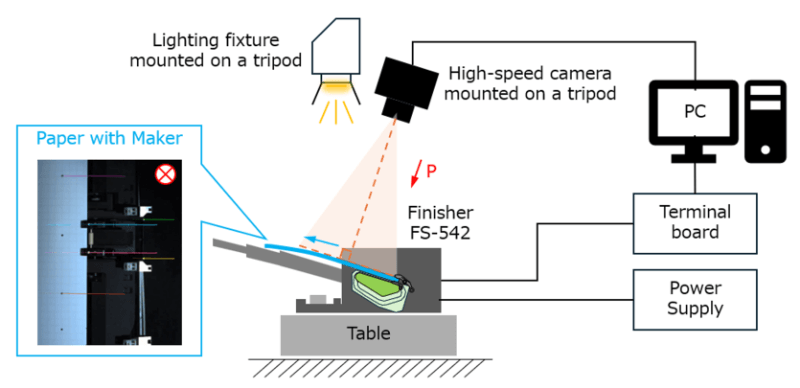
Fig. 5 Measurement system for paper feed dynamics
装置の撮影設定として、撮影対象物と垂直となるようにカメラの画角を調整すること、追跡対象物の動作範囲全域を画角に収めること、照明の当て方によっては影・反射・ハレーションで追跡用のカラーマーカーが消失することがあるため、これらに配慮する必要がある。ソフトウェア側での撮影設定として、撮影速度は、500~1000 fps程度とした。観察現象を0.01~0.02 sと前提を置いて、その10倍以上の設定とした。これはナイキストの標本化定理に実用上の余裕度を加味したものである。
また、シャッターの設定は、1フレームの半分の時間だけ露光することで、動きの残像が人間の目に自然に見える。寸法が既知な格子パターンを画像に移し込み、歪み補正を行う。また、画像内における座標を求めるための基準尺としても利用する。照明ムラ(中央部より周辺部が暗くなる現象)に対しては、シェーディング補正を行う。
2-3. 動画解析方法
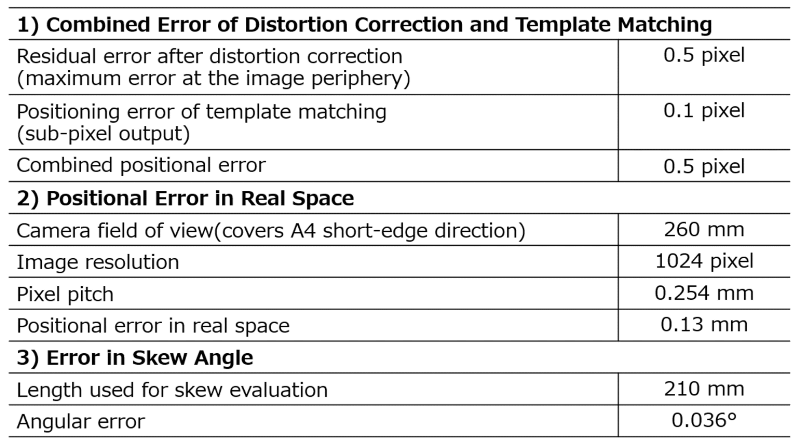
高速度カメラによる高速運動の可視化をさらに定量的解析へと導くものが動画解析である。対象物の画像内における座標データを求め、各フレームにおいて対象物を追跡することで挙動の定量化が可能となる。すなわち、座標データとフレーム間の時間差から対象物の変位、速度、加速度を計算することが可能となる。ここで、画像解析アルゴリズムとしては、テンプレートマッチングによるトラッキングを用いる。これは、予め対象物を指定して記憶させることで、各フレームでその対象物と最も類似度が高い位置を探索する手法である。Fig. 6に一連の動画解析の手順を示す。(a)撮影設定および格子パターンを用いたレンズ歪のキャリブレーション、(b)初期の画面上で参照画像(追跡対象)と探査範囲(参照画像と同じパターンを探す範囲)を指定、(c)追跡実行(自動的に各フレームにおける探査範囲の中からパターンマッチングによって対象の座標が取得される)、(d)時系列的な座標データの変化をグラフ描画といった工程で解析を行う。ここで、動画解析ソフトはオープンソースソフトウェアであるKinovea(v.0.9.5)3)を利用した。本手法の計測精度をTable 1に示す。
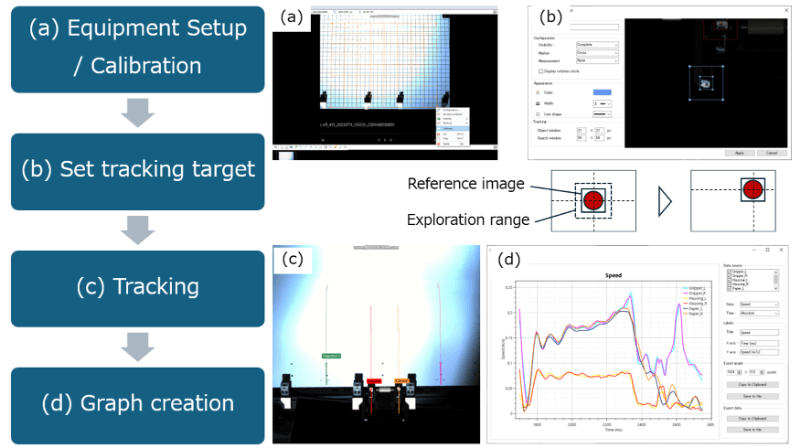
Fig. 6 Video analysis method
Table 1 Skew measurement accuracy
3 結果と考察
3-1. 直進性の定量化と傾き補正機構の設定値の決定
グリップ排紙動作の過渡的なスキューをFig. 7に示す。紙束の前後の移動量差を一元的に管理しやすい「スキュー」に置き換えた。ここで、スキューとは、搬送中の用紙が本来の紙送り方向に対して回転し、用紙の前縁・後縁・側縁が基準線と平行でなくなる角度誤差のことである。「紙束の直進安定性が良いこと」を基本機能として捉えた。すなわち、「紙束の前後スキューが小さい」ことを評価基準とした。ここで、スキューはEq. (1)を用いて計算した。xとyは現在のフレームにおけるマーカーの画像位置である。2点間の距離を用いることで角度を算出している。
Fig. 7(a)に、対策前のグリッパー、ハウジング、搬送用紙の時系列の傾き変化を示す。スキューが管理値を超える場合、Fig. 2(e), (f)に示す紙束を積載トレイに置く工程において、傾いた紙が背板の上方に引っ掛かる。波形の落差が管理値を超える。すなわち、初期角度からの角度変化が管理値を超える場合をNGとして扱う。Fig. 7(b)に、対策後の解析結果を示す。動作全域において、変動が小さく、スキューを抑えられている。ここで、制御因子として、前述した機構部の傾き補正のためのばね力量を最適化した。
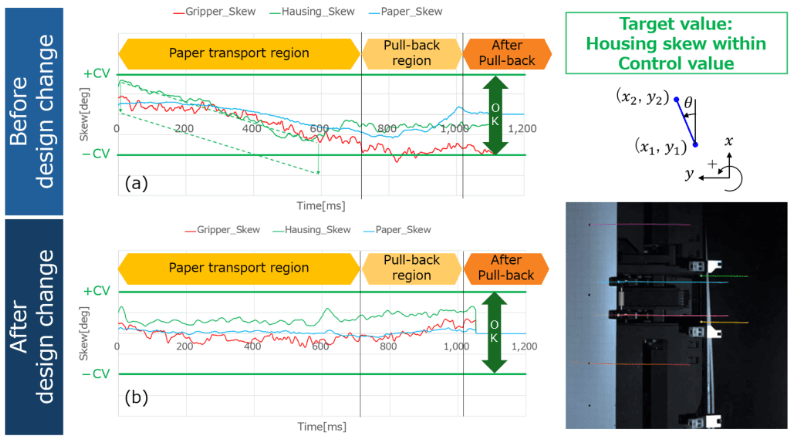
Fig. 7 Visualization of dynamic paper feed behavior

3-2. 慣性力の定量化と駆動速度パターンの決定
Fig. 8にグリップ把持部の動力学モデルを示す。また、Eq. (2)は紙束が搬送に伴い受ける慣性力、Eq. (3)は一対のグリッパーによる把持力(摩擦力)、Eq. (4)は搬送中に紙束の把持状態を維持できる臨界条件をそれぞれ示す。ここで、各パラメーターの定義と数値をTable 2に示す。グリッパー把持のためのねじりコイルばね力量は前節で示した直進性を加味して決定した。本節では、さらに把持状態を維持しつつ動作時間制限を満たした速度指令パターンを見出すことを目的とする。
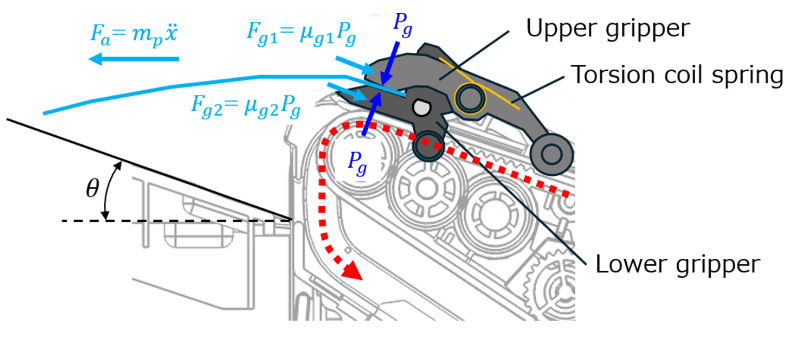
Fig. 8 Dynamic model of the gripper
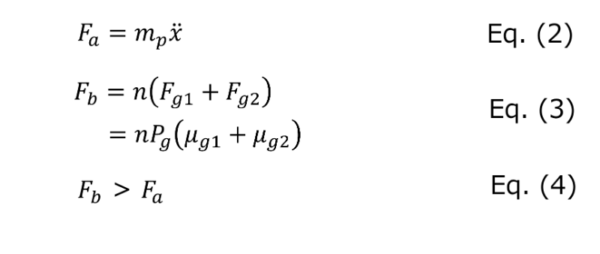
Table 2 Parameters of the gripper
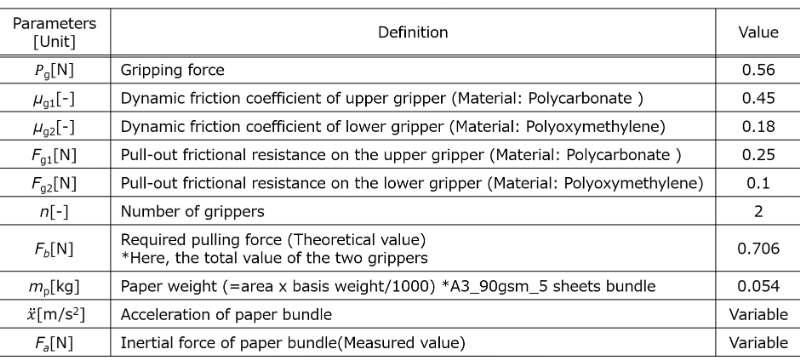
画像解析により実測した加速度から紙束の慣性力Faを算出することができる。ここで、慣性力Faは、運動状態の変化に抵抗する向きに働く力であり、機構の急加速・急減速・振動時に変化が大きくなる。この変化を小さくすることで把持状態の安定性が確保される。Eq. (4)に従い、この慣性力がグリッパー把持力Fbを超えないことを目標として、グリッパー周回速度指令を変更した。Fig. 9(a)に対策前の速度指令パターン(破線で示す)および各マーカーの速度実測値、慣性力の推定値を示す。慣性力の波形をみると、(1)グリッパーが紙束を掴む瞬間の位置、(2)ハウジングに掛かるベルトテンションが最小となる位置、(3)グリッパー周回軌道において直線経路から曲線経路に切り替わる瞬間の位置において、慣性力が増加しており、式(4)の臨界条件が不成立となる箇所があった。そこで、Fig. 9(b)に示すように速度指令パターンを見直すことで、動作全域において、臨界条件を成立させることができ、安定した把持状態の維持を実現した。ここで、シーケンスの動作時間は延びたが、許容される範囲で調整した。
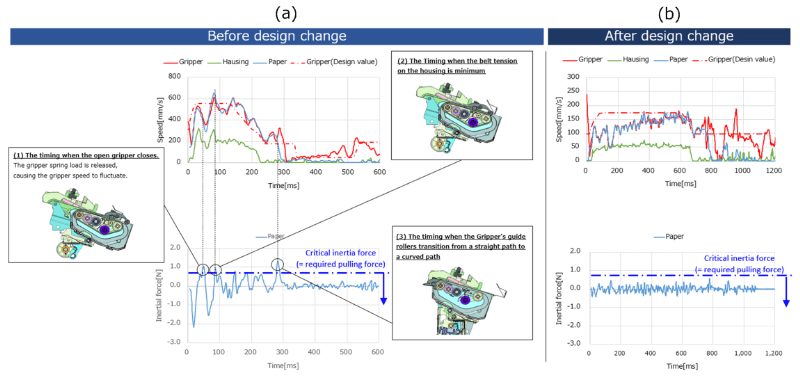
Fig. 9 Measurement and analysis of inertial force
3-3. 他の機能への水平展開
本評価手法は排紙機能以外にも適用可能である。ここでは、事例として整合機能の評価について述べる。整合機能とは、Fig. 2(c)~(d)に示すように、紙をスイッチバック搬送し、エンドフェンスおよびサイドフェンスに突き当てて、紙の四辺を揃えるシーケンスである。Fig. 10(a)に示すように、パドルでスイッチバック搬送している最中に、サイドフェンスの速度が大きいと、衝撃的に紙と当接して弾き飛ばす現象が発生する。このため、傾きを補正しきれずに整合ずれが生じていた。そこで、動画解析を用いて、最適な駆動速度および動作タイミングを決定した。結果として、Fig. 10(b)に示すように、紙を弾き飛ばすことなく滑らかに搬送することが可能となった。
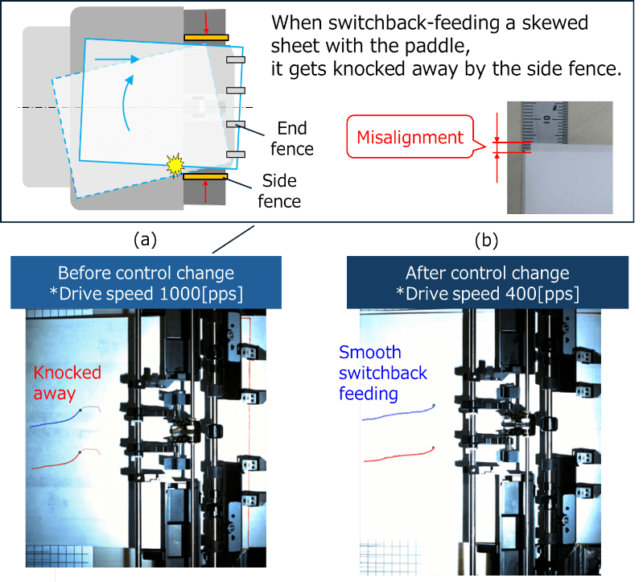
Fig. 10 Optimization of the driving speed of the side fence
3-4. 現状と展望
高速度カメラによる動画解析によって用紙搬送挙動を定量化することで、過渡状態に対する具体的な管理値を設定することができるようになり、機能の良否を判定できるようになった。また、動力学モデルと組み合わせることで、特にメカ機構や駆動制御のパラメーター設計の段階で有効な評価手法であることを検証できた。本評価手法を磨き上げ、今後の製品化の中でも機能の作り込みに対する評価技術として運用していきたい。
4 結言
基本機能を明確に定義し、それを効果的に計測するための評価技術を構築し、設計反映することで製品開発の効率化に寄与することができた。今後は、評価のコンパクト化(評価手順の簡略化や機材の簡素化)、誤差因子を拡大した評価方法の構築、他ユニットの評価への転用など発展形の検討を進めていく。

