
1 はじめに
超音波検査は低侵襲で簡便に実施でき,医療現場に広く普及している検査である。中でも,血管エコー検査は,血管壁の状態や血流をリアルタイムに検査できるため,さまざまな領域で実施されている。例えば,生活習慣病や閉塞性動脈疾患などの診療に際して頸動脈超音波検査が行われており,透析領域では,近年,VAエコーの有用性が認められてきている。
血管エコー検査はBモードと呼ばれる2次元断層像を用いた形態評価だけでなく,続けて複数のモードを使用して血流による機能評価も実施するため,超音波診断装置の多くのパラメーターを手動で調整する必要があり,操作者への負担,検査されている患者への負担も少なくない。
そこで,血管エコー検査時の煩雑な操作を減らし,客観的な評価と検査時間の短縮を実現するVascular NAVI機能を開発し,当社の超音波診断装置であるSONIMAGEMX1αおよび SONIMAGE HS2に搭載した(Fig. 1)。本稿では,このVascular NAVI機能について報告する。

Fig. 1 Photographs of ultrasonic diagnostic system SONIMAGE MX1α and SONIMAGE HS2.
2 VAエコーについて
糖尿病などで腎臓の機能が低下し,慢性腎不全になると老廃物や水分が適切に尿中に排泄されなくなる。そこで腎臓の代わりに老廃物などを除去するための治療法が血液透析である。
血液透析において,血液を取り出す出入り口をVAと呼び,VAの一つにシャントがある。シャントとは動脈と静脈をつなぎ,静脈により多くの血液が流れるようにして血液の循環量を確保するための方法またはその状態のことである。
VAエコーは,VA作製前後の血管評価,VAの日常管理,血流不全(脱血不良など)や穿刺困難のようなトラブル時の病態把握などを目的として実施されている。
2. 1 VAエコーにおけるシャント機能評価の意義
エコーによるVA評価(以下,VAエコー)は,血液透析を施行するにあたり,血管の状態や循環能力を把握するために行われる。評価項目は,上腕動脈におけるFV,末梢血管抵抗指数(resistance index,以下RI),収縮期加速時間(acceleration time,以下AT),狭窄径,狭窄形態,狭窄率,閉塞形態などがある。FV,RI,ATはシャントの機能評価として診断基準が設けられている。血流評価と狭窄病変の部位や程度から血行動態を把握し,総合的にシャントの良否を判断する。
2. 2 従来のシャント機能評価手順
VAエコーにおけるシャント機能評価の手順について以下に示す。
検査者は,まずBモードで対象となる血管を描出し,血管の走行や太さ,深さ,閉塞や狭窄の有無などを観察する。この時,閉塞や狭窄の有無確認には,血管を短軸像,長軸像で観察し,Bモードに加えてカラードプラモードを使用することもある。カラードプラモードとはBモード画像上に血流情報を重ねて表示するモードである(Fig. 2)。
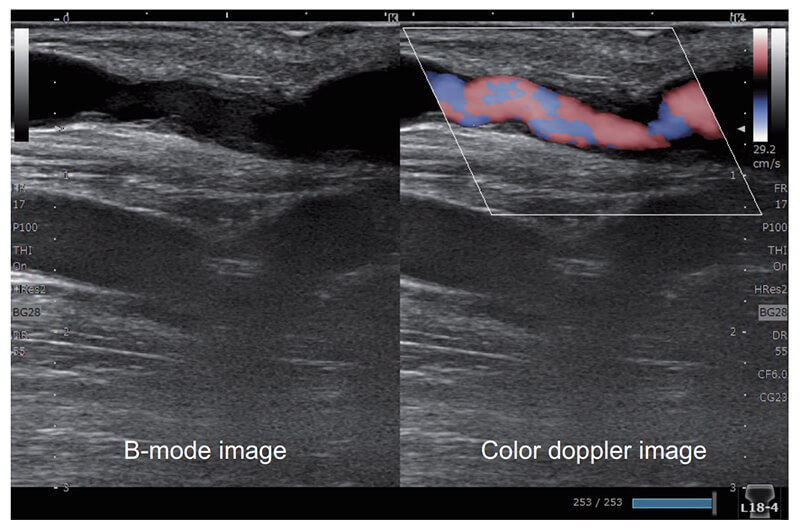
Fig. 2 B-mode image and Color doppler image of blood vessel.
次に血管の長軸断面を描出し,パルスウェーブドプラモード(pulse wave doppler mode,以下PWモード)を起動して,関心領域を決定してから血流評価を行う。
PWモードとは移動する物体から受信する超音波の周波数が偏移することを応用し,関心領域の血流速度情報を取得するモードである。超音波診断装置上には,縦軸が流速,横軸が時間の波形で表示される(Fig. 3)。
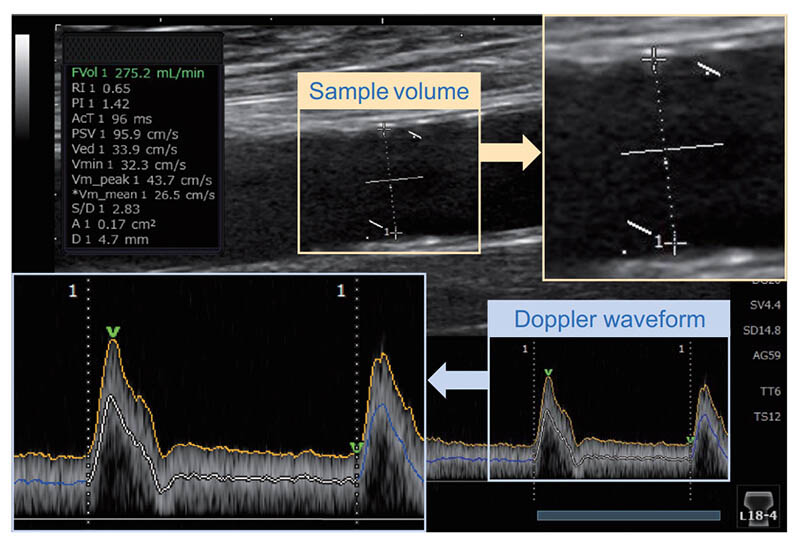
Fig. 3 An example of PW mode that displays blood flow velocity information in the interest region.
関心領域は,Fig. 3 に示すように,検査者がBモード画像上の対象血管中心にサンプルボリュームを設定することで指定される。サンプルボリュームは,対象血管の太さに応じて,幅(以下,サンプルボリュームサイズ)を変更することも可能である。サンプルボリュームサイズの設定は検査の内容によるが,血流量を推定する場合は,血管の内径と同程度に調整する。次に,超音波ビームの入射角(以下,ステア角)の調整を行う。PWモードでは超音波ビームと血流のなす角度が60°を超えると急激に誤差率が大きくなり,計測値の信頼性が低下する。そのため,血流に対して適切な入射角度になるように,ステア角を設定する必要がある。さらに,ステア角に対する血流の方向を示す角度補正値をBモード画像の血管の方向にあうように調整する。その後,アップデートボタンを押してドプラ波形を表示し,ドプラ波形のベースラインと流速レンジを調整する。
シャント機能評価におけるPWモードの評価項目はRIとFVが一般的である。RIは収縮期最大血流速度(peaksystolic velocity,以下PSV)と拡張末期血流速度(enddiastolic velocity,以下 EDV)とから式(1)で算出され,計測部位より末梢の血流の流れにくさを反映する指標である。
RI = (PSV − EDV) / PSV (1)
装置にはドプラ波形を自動的にトレースしてRI,PSV,EDVなどの計測値を算出するオートトレース機能が搭載されているものもあり,自動で算出することもできる。FV(単位:mL/min)は,平均血流速度(単位:cm/s)と,血管を円と仮定し血管径を手動で計測した結果を用いて算出された断面積(単位:cm2)とから式(2)により求められる。
FV = 平均血流速度 × 血管断面積 × 60 (2)
このように,従来は患者に応じて装置の多くのパラメーターを手作業で調整し,計測に多くの時間を要していた。また,角度補正値や血管径の計測値によって計測結果に差が生じるため,検査者間の誤差は避けることができないと言われていた1)2)3)4)。
3 Vascular NAVI機能について
前述のように,従来の血流評価は各機能を理解したうえで多くの操作が必要であった。これを解消するために,我々は,超音波診断装置の画面上に描出された血管画像を解析し,PWモードのパラメーター(サンプルボリューム位置,ステア角度,サンプルボリュームサイズ,角度補正値)およびドプラ波形のベースラインと流速レンジを適切に制御するVascular NAVI機能を開発した。Vascular NAVI機能の特徴は以下の3点である。以降の章でそれぞれについて詳しく説明する。
1)少ないステップで計測できる操作フロー
2)さまざまな描出状態の血管に対応する画像認識技術
3)修正しやすいユーザインタフェース
3. 1 Vascular NAVI機能を用いた血流評価の流れ
Vascular NAVI機能による血流評価手順を示す。Fig. 4はSONIMAGE MX1αにおけるVascular NAVI機能の操作手順である。
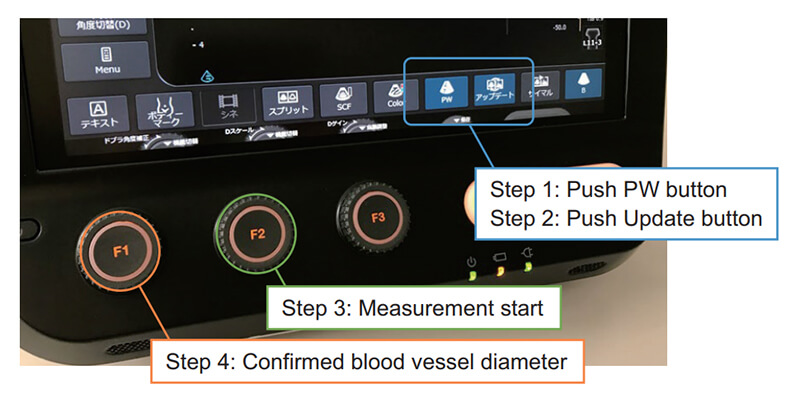
Fig. 4 The operation procedure of the Vascular NAVI function by the SONIMAGE MX1α.
検査者は,まずBモードで対象となる血管の長軸断面を描出する。次にPWモードを起動する。この時,サンプルボリューム位置,ステア角度,サンプルボリュームサイズ,角度補正値はVascular NAVI機能により自動で調整される。検査者は調整されたパラメーターが適切で
あるか否かを確認した後に,アップデートボタンを押してドプラ波形を表示する。ドプラ波形のベースラインと流速レンジもVascular NAVI機能によって最適に調整され,さらに,オートトレース機能によってRI,PSV,EDVなどの計測値が自動で算出される。
FV計測を行う場合は,計測ボタンを押した後,血管の近位壁,遠位壁と順に表示されるカーソル位置を確認しSetキーで確定するとFV値が表示される。
Table 1 に従来操作とVascular NAVI機能による操作手順の比較を示す。
Table 1 A comparison between the conventional operation and the operation using the Vascular NAVI function.
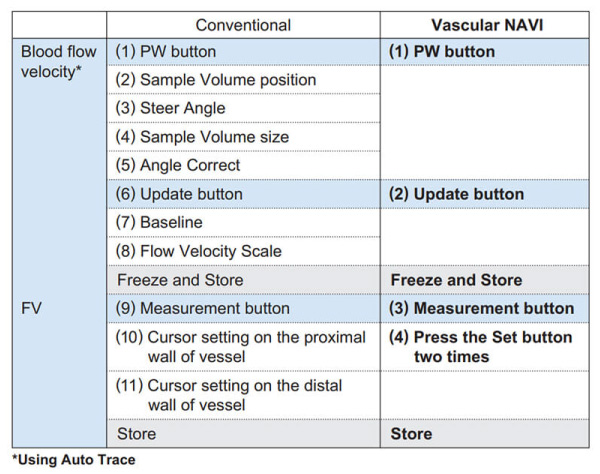
このように,従来はFV計測に11ステップの操作が必要であった。これに対してVascular NAVI機能では,ステップ(2)から(5)のサンプルボリューム位置,サンプルボリュームサイズ,ステア角度,角度補正値や,ステップ(7)および(8)のベースラインと流速レンジが自動で設定されるので,4ステップの操作でFV計測が完了する。
3. 2 Vascular NAVI機能を実現する画像認識技術
ここまでは,透析領域における血流評価の重要性やVAエコーの手順について説明してきた。以降では,前述のVascular NAVI機能の簡単操作を実現する技術的な解説を述べる。
3. 2. 1 血管位置の検出
はじめに,描出されたBモード画像の中から血管位置を検出し,PWモード実行時のサンプルボリュームの位置を決定する。
Bモード画像では,血管壁は高輝度,血管内腔は低輝度に描出される。そこで,血管位置の検出処理では,深度方向に高-低-高の輝度パターンとの一致度を評価する。このとき,さまざまな血管サイズに対応するために,元画像を縮小処理させた評価も行う(Fig. 5)。
さらに,評価値に重みをもたせることにより,PWモードの起動時は画像全体から最も血管らしい位置を検出し,既にPWモードを使用している場合には表示されているサンプルボリュームの位置から最も近い血管を検出することで微調整ができるようにしている。このようにして,評価値が最大となる位置を血管として検出する。
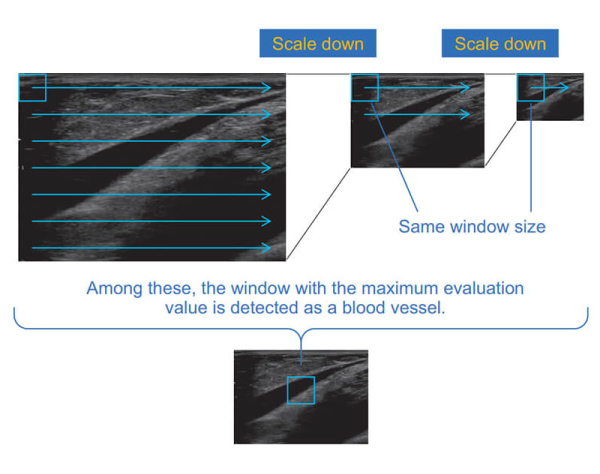
Fig. 5 Detection of blood vessel position from a B-mode image.
3. 2. 2 血管境界の検出
3. 2. 1節の処理にて検出した血管位置を含む所定の領域において血管境界(近位壁と遠位壁にあたる境界)の検出を行い,PWモードのサンプルボリュームサイズを決定する。
血管壁は高輝度,内腔は低輝度となっているため,深度方向の輝度変化を評価する。Bモード画像では,血管境界付近にノイズが発生することもあるため,輝度変化量による評価だけでは,血管境界候補位置と正しい境界位置が一致しない場合がある。そこで,候補位置の水平方向の連続性も評価している。具体的には,深度方向の輝度変化量と位置の連続量をコストとした経路探索問題に置き換え,コストが最小となる経路を血管壁境界として検出する(Fig. 6)。
ここで求めた近位壁と遠位壁の2つの血管境界から血管径を算出し,ゲートサイズを自動調整する。
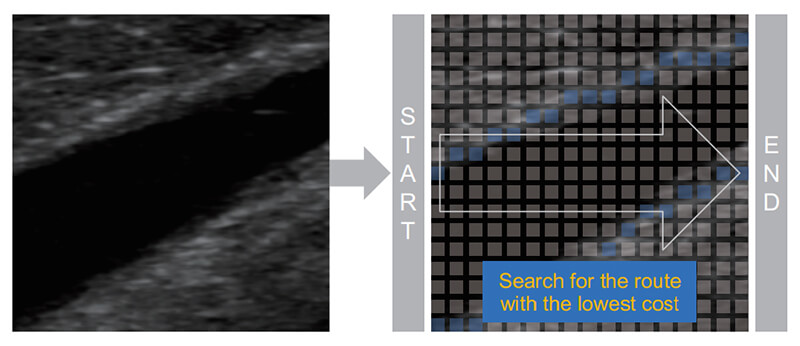
Fig. 6 Detection of blood vessel wall boundaries by route search method.
3. 2. 3 血管走行の検出
血管の走行については,3. 2. 2節で求めた血管の近位壁と遠位壁の2つの境界から血管中心を求め,直線でフィッティングさせて血管の傾き角度を算出する。次に,血管の傾き角度に対して,角度補正値が 60°を超えないようにステア角度を設定する。この時,角度補正値が 60°以下かつ 60°に近い値を保つように設定するようにし,必要以上に大きなステア角度とならないように設計した。これによって,PWモードの感度の低下やアーチファクトの増加を防ぐことができる。
3. 2. 4 FV計測時の血管径計測支援
前述の通り,FVを計測する際は血管径を計測する必要がある。そこで,3. 2. 2節で検出した血管境界のうちゲート位置から血管走行に対して垂直方向に延長したラインが血管境界と交わる位置に計測カーソルを表示している。この時,検査者は計測カーソルの位置を確認し,問題なければ確定操作を行う。意図した位置でない場合は,計測カーソル位置を微調整した上で確定操作する。このように,検査者が確認,修正した上で確定するステップを設けることにより,仮に検出された計測カーソル位置が検査者の意図する位置とずれていてもスムーズに修正することができる。
4 性能評価
社内の健常者を対象とし,Vascular NAVI機能を用いたFV計測性能を評価した5)。
4. 1 評価方法
総頸動脈,外頸動脈,内頸動脈,椎骨動脈を含む頸動脈80例と上腕動脈30例を対象に,手動と自動で計測を行い,FVを比較した。なお,計測は全て臨床検査技師が実施した。この時,Vascular NAVI機能によって検出・設定されたパラメーター等はそのまま使用し,検査者による修正は行っていない。
4. 2 評価結果
Vascular NAVI機能を用いた自動計測により,評価対象の全てにおいて正しい血管位置及び走行,血管境界を検出し,PWモードのサンプルボリューム位置,サンプルボリュームサイズ,ステア角度,角度補正値を適切に調整できた。
血管径とFV値における各々の手動と自動の相関を,Fig. 7 (a)とFig. 7 (b)に示す。血管径については手動計測と自動計測の間に相関係数r=0.979(p値<0.0001)の 高い相関があり,FV値についても手動計測と自動計測 の間に相関係数r=0.984(p値<0.0001)の高い相関を 認めた。
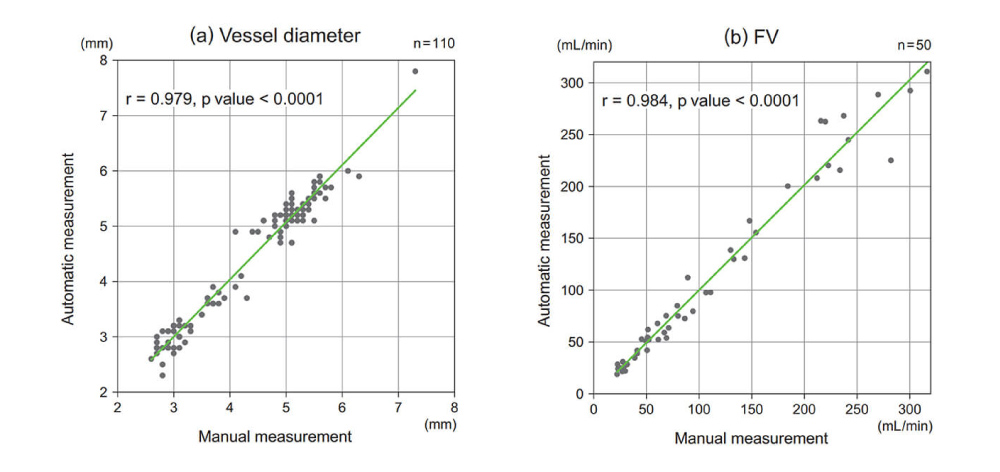
Fig. 7 Correlation between automatic measurement and manual measurement of vessel diameter (a) and FV (b).
4. 3 考察
今回の性能評価では,頸動脈,上腕動脈などの血管径や深度の異なる対象に対して,PWモードにおけるパラメーターを全て正しく自動で調整できた。また,Vascular NAVI 機能を用いた血管径およびFVの自動計測と手動計測の間に相関係数r>0.9という非常に高い相関が得られており,従来操作に置き換え得る性能が確認できた。
5 まとめと今後
血管エコー検査の煩雑な操作の改善に着目し,VAエコーにおけるシャント機能評価時のワークフローを改善するVascular NAVI機能を開発した。
Vascular NAVI機能は,Bモード画像を解析し,PWモードのパラメーター(サンプルボリューム位置,ステア角度,サンプルボリュームサイズ,角度補正値)を自動調整し,PWモードのドプラ波形を解析してベースラインと流速レンジを自動調整する機能である。本機能にて,健常者による評価を行い,臨床使用するにあたり十分な性能であることを確認した。
本機能により,血流評価における煩雑な操作を減らし,客観的な評価と検査時間の短縮が期待できる。
本稿では詳しく触れなかったが,2021年に上市したSONIMAGE HS2の新バージョンでは,カラードプラ検査において血管の長軸断面と短軸断面を自動的に判定してステア角を調整する機能が追加され,更に性能を向上している。さらに,この新バージョンでは,音声コントロール機能やカメラリンク機能も追加された。
音声コントロール機能は,Vascular NAVI機能を音声で起動して操作できるため,両手がふさがっている場合や,清潔環境下で装置のボタンや画面を触りたくない場合に有用である。カメラリンク機能は,例えば Fig. 8 に示すように患者の上腕の画像とエコー画像を合わせて記録できるため,FV計測位置や穿刺位置がより分かりやすい形で記録できる。
これらの追加機能とVascular NAVI機能を組み合わせることで,より簡単で清潔な操作および診療の記録が可能となる。
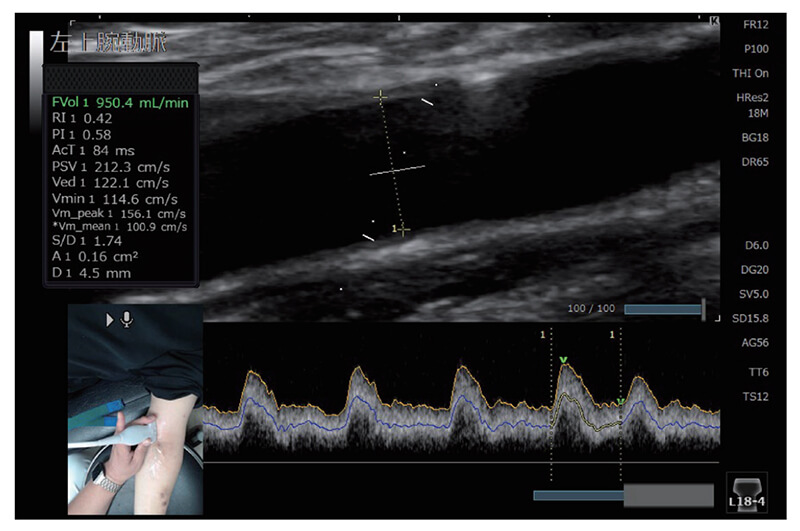
Fig. 8 An example of the camera link function of the SONIMAGE HS2.
今後も更なる“かんたん”を追求してワークフローを改善することより,患者ひとり一人のケアや診療が充実し,QOLの向上につながることを期待する。

