
Highly versatile robot technology that revolutionizes manufacturing sites
Meeting diverse needs by automating the production of smaller quantities of diverse products

Creation of new manufacturing operations to meet diversifying needs
In conventional mass production operations, processes are automated for respective products to improve productivity.
As labor shortages continue to worsen, the automation of production is expected to become increasingly important for producing smaller quantities of diverse products.
Previously, when automating a production process to feed workpieces (parts) to a designated location, different robots were required for respective types of workpieces. If a single robot can feed multiple types of workpieces, it will be possible to produce smaller quantities of diverse products. Simulation-based robot teaching will help reduce the time required for installation and process design.
Konica Minolta has been striving to offer the benefits of producing smaller quantities of diverse products with less manpower by leveraging its mechatronics, sensing, and image processing technologies refined through the development and production of office equipment.

Technology Overview
The process of feeding workpieces (parts) requires the technology to transfer multiple types of bulk workpieces, which are stacked, to the designated location one by one (i.e., picking).
To automate this process, it was necessary to develop a robot equipped with a 3D camera to observe the status of workpieces, a function to recognize and calculate the position and posture to determine the placement of workpieces and the picking sequence based on the observed condition, and multiple hands to grasp workpieces under any condition. However, it was difficult to handle different types of workpieces and downsize the equipment.
In response, Konica Minolta developed multifunctional single robot hand technology, which makes it possible to grasp different types of workpieces, recognition technology to estimate the position and posture of workpieces using a simple and compact 2D camera, and arm trajectory simulation technology, which can significantly reduce the time required to verify the robot arm trajectory.
Multifunctional robot hand

Multifunctional robot hand
A single robot hand is equipped with two functions to enable bulk picking of various shapes (sizes and weights). One function is to hold and “grasp” bulk workpieces at a time, and the other is to “pick” the precise position of parts by moving the fingertips with high accuracy. To achieve these two functions, Konica Minolta developed a technology for a parallel link mechanism (to open and close the fingertips and move up and down).
This mechanism achieves the parallel link operation by synchronizing two servo motors to open and close the fingers and move up and down. Sophisticated holding operation is achieved by torque control, position control and speed control.
This multifunctional robot hand enables various bulk parts to be picked simply by changing the software parameters.
Development of an algorithm for object recognition of bulk workpieces

Robot hand camera and an object recognition image
Konica Minolta has developed a technology to achieve accurate object recognition of bulk workpieces (parts).
First, an image of multiple workpieces is captured as an overhead view. After identifying the overall position and posture of workpieces, the camera built into the robot arm captures an image in proximity to the workpieces to recognize them.
Previously, template images of the posture of workpieces were required for 360° to enable pattern matching between the shapes of target workpieces (templates) and captured contour images. The new technology allows the camera to come close to workpieces so that the image capturing angle and magnification become the same. Thus, the workpieces are in a certain position and angle in the proximity images, making it possible to achieve high-speed and high-accuracy recognition with fewer template images of ±10°.
An accurate parts recognition algorithm was developed using a general-purpose camera by applying imaging technology, a field in which Konica Minolta excels.
Robot arm trajectory simulation
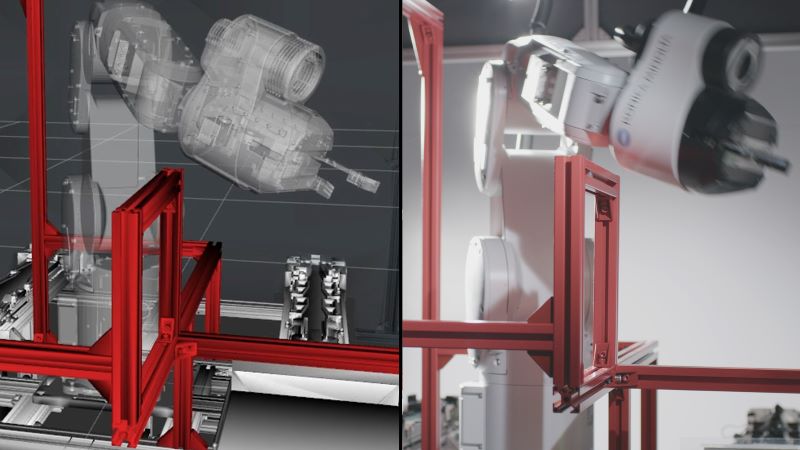
Simulation (left) and actual operation image (right)
In the conventional robot arm trajectory design, specialized engineers worked on trajectory programming by operating a robot on the actual production equipment.
A simulator developed by Konica Minolta makes it easy to generate and verify arm trajectories in virtual space in advance.
The arm trajectory simulator was developed as an easy-to-use package for customers by utilizing the Robot Operating System (ROS), an motion planning package for ROS (Moveit!), and a 3D visualization tool (Rviz).
When the 3D CAD data and usage conditions of a robot arm and peripheral equipment are entered in the simulator, the shortest arm trajectory while avoiding obstacles of the equipment is automatically calculated. A program for each robot arm manufacturer is automatically generated, thus significantly improving the design efficiency of robot arms in various operations.
Category to which this technology applies
(click to see a list of technologies in that category)
Share



